Next
Termin składania wniosku: bezterminowo
Analog mobilnego robota marsjańskiego #next w 2015 roku zbudowali studenci Wydziału Mechanicznego Politechniki Białostockiej w składzie: Maciej Rećko, Maciej Baka, Piotr Czaplicki, Jakub Kuryło, Artur Milewski i Michał Ostaszewski. Zespołem opiekowała się dr inż. Justyna Tołstoj-Sienkiewicz.
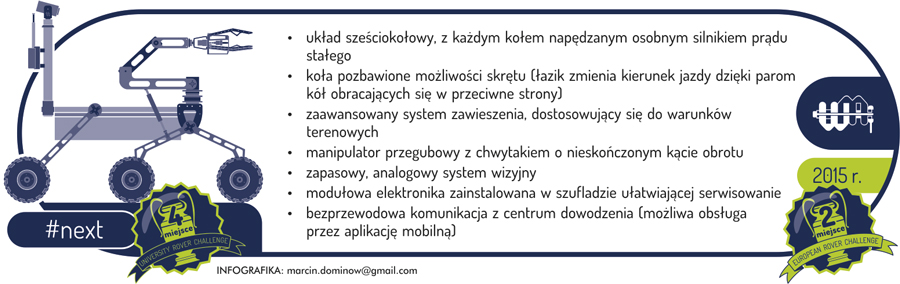
Analog łazika #next zaprojektowano jako sześciokołową mobilną konstrukcję, . Każde koło sterowane było niezależnie. Robota wyposażono w manipulator o 5 stopniach swobody oraz chwytak z trzypunktowym chwytem i nieskończonym kątem obrotu. Sterowanie łazikiem odbywało się za pomocą komputera osobistego klasy PC poprzez radiomodem. Możliwe również było sterowanie przy pomocy telefonu z systemem Android. Jako komputer pokładowy wykorzystano BeagleBoneBlack pracujący pod kontrolą systemu DEBIAN7. Obraz z 5 kamer robota przesyłany był przez system używający częstotliwości 900MHz i 2.4 GHz. Informacje o położeniu robota zapewniał system GPS, zintegrowana jednostka pomiarowa mierząca przechyły, pochyły i obroty w układzie lokalnym oraz seria enkoderów (jednostka, która wylicza obroty wału) na napędach i układ samokontroli termiczno-napięciowej.
Robot wziął udział w University Rover Challenge w USA, zajmując czwarte miejsce i zdobywając 344 punkty na 500 możliwych. Na European Rover Challenge zajął drugie miejsce.
Projekt współfinansowano dzięki programowi Generacja Przyszłości.
Sprawdź też inne projekty studentów z Koła Naukowego Robotyków.








