Sukces dyplomantów WM w Konkursie „Wygraj staż”
10-11-2020Rozstrzygnięto kolejną edycję konkursu „WYGRAJ STAŻ – konkurs na najlepszą pracę dyplomową”, organizowanego przez firmę Automatyka Pomiary Sterowanie S.A oraz Wydział Elektryczny Politechniki Białostockiej.
Komisja postanowiła przyznać I miejsce oraz nagrodę główną – 3-miesięczny płatny staż w firmie APS dla Pawła Kołosowskiego za pracę pt.: „Realizacja gry w szachy z wykorzystaniem manipulatorów przemysłowych i systemu wizyjnego”. Zgodnie z regulaminem konkursu dodatkowy bonus w wysokości 3000 zł przypada Katedrze/Promotorowi pracy Laureata.
Komisja postanowiła również przyznać wyróżnienie dla Kamila Kondziora za pracę pt. „Projekt i wykonanie przegubowego manipulatora dla autonomicznego robota mobilnego”.
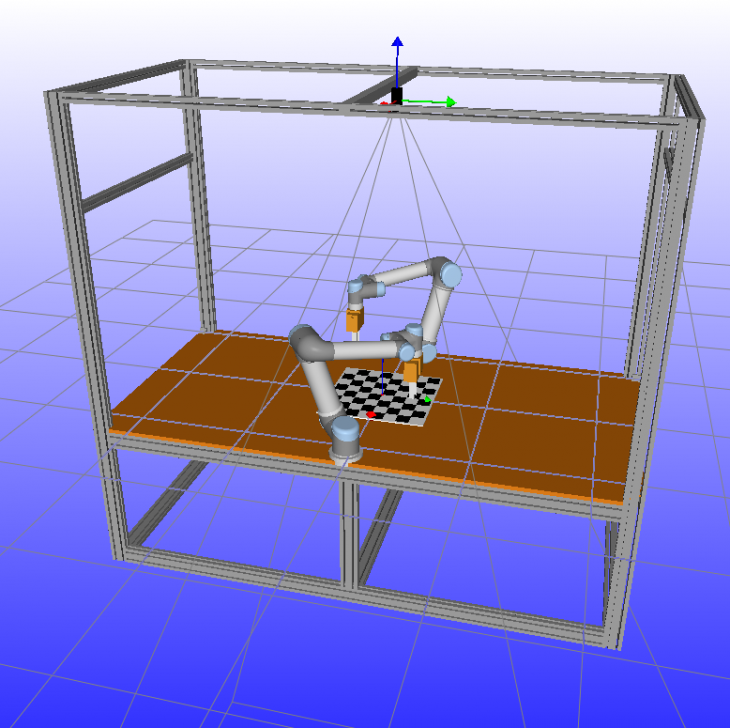
Praca magisterska Pana Pawła Kołosowskiego za pracę pt.: „Realizacja gry w szachy z wykorzystaniem manipulatorów przemysłowych i systemu wizyjnego”.
Mgr inż. Paweł Kołosowski swoją pracę magisterską realizował na kierunku Mechatronika na Wydziale Mechanicznym Politechniki Białostockiej. Promotorem pracy był dr inż. Adam Wolniakowski. W opracowanym systemie można grać w szachy na żywo z przeciwnikiem w postaci robota wyposażonego w chwytak, obserwować grę dwóch robotów, lub wykorzystać robota jako zdalne ramię ludzkiego przeciwnika grającego zdalnie. System wizyjny opracowany przez dyplomanta jest w stanie śledzić ruchy figur, a autorski silnik szachowy oferuje kilka poziomów trudności dla każdego miłośnika gier planszowych. Wykonanie takiej pracy wymagało znakomitych umiejętności z dziedziny robotyki oraz programowania.
Na podstawie pracy Pawła Kołosowskiego powstał artykuł, który zaprezentowano na międzynarodowej konferencji Mechatronic Systems and Materials 2020.
Praca inżynierska Kamila Kondziora pt. „Projekt i wykonanie przegubowego manipulatora dla autonomicznego robota mobilnego”.
Opiekę nad pracą Kamila Kondziora z Wydziału Mechanicznego Politechniki Białostockiej sprawował dr inż. Leszek Ambroziak.
Celem pracy dyplomowej było sporządzenie projektu i wykonanie konstrukcji mechanicznej manipulatora z możliwością jego zamocowania na platformie autonomicznego robota mobilnego Turtlebot3 Burger oraz opracowanie układu sterującego z wykorzystaniem systemu wizyjnego.
Projekt części mechanicznej wykonany został przy pomocy środowiska SOLIDWORKS. Przeprowadzony został dobór serwomechanizmów pełniących rolę urządzeń napędowych. Zaprojektowane części manipulatora zostały wytworzone przy pomocy technologii druku przestrzennego z tworzywa sztucznego-polilaktydu (PLA).
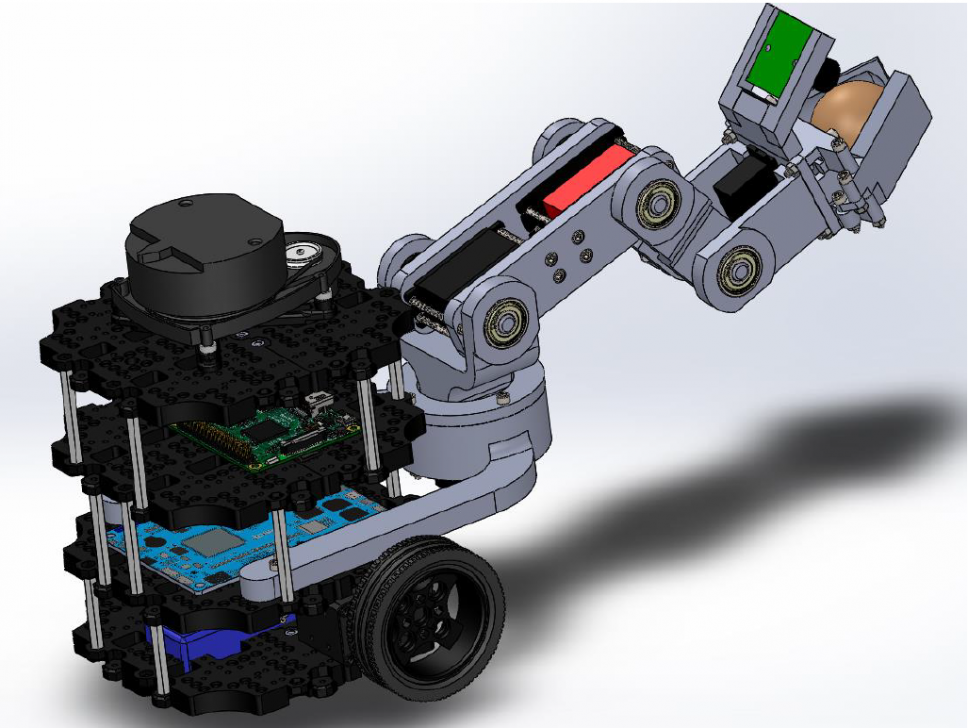
Stworzony układ sterujący zrealizowany został w oparciu o jednostkę Raspberry Pi 3B. Za pomocą zmian poziomu wypełnienia sygnału PWM na poszczególnych pinach GPIO, realizowana jest zmiana pozycji położenia serwomechanizmów. Określanie zmiennych przegubowych wykonywane jest w oparciu o wzory wyznaczone poprzez rozwiązanie zadania kinematyki odwrotnej manipulatora.
W projekcie zaimplementowano system umożliwiający automatyczne rozpoznawanie przedmiotów. Identyfikacja obiektów wykonana została przy użyciu biblioteki OpenCV. Do rozpoznawania obiektów, którymi były piłeczki pingpongowe o dwóch kolorach, użyto mechanizmów analizy koloru, kształtu oraz rozmiaru obiektów.
W pracy przedstawione zostały wyniki testu działania wykonanego manipulatora opierającego się na określeniu dokładności osiąganych pozycji końcówki roboczej chwytaka oraz poprawności działania systemu rozpoznawania obiektów.
Serdecznie gratulujemy i życzymy dalszych sukcesów.