Magma 2
Magma druga – miejsce pierwsze
Analog mobilnego robota marsjańskiego Magma 2 zbudowano w 2011 roku. Projekt zrealizowano przez Wydział Mechaniczny Politechniki Białostockiej oraz stowarzyszenie Mars Society Polska. W skład zespołu konstruującego robota weszli: Wojciech Głażewski, Piotr Ciura, Emil Błoński, Szymon Zimnoch, Bartosz Solnik oraz Jacek Wojdyła, Paweł Krzywosz, Krzysztof Pisowacki i Paweł Solnik. Opiekę nad zespołem sprawowali: dr hab. inż. Kazimierz Dzierżek oraz dr inż. Justyna Tołstoj-Sienkiewicz.
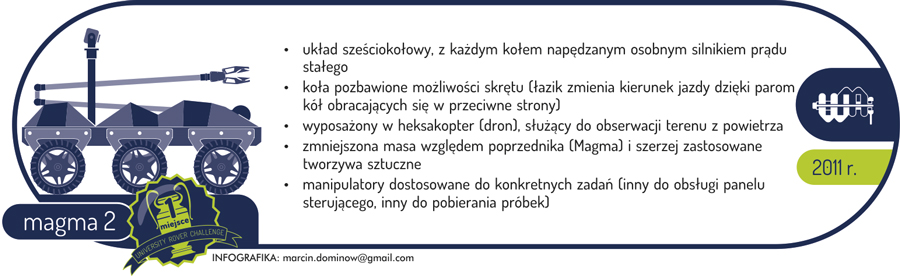
Magma 2 był konstrukcją sześciokołową. Zastosowano w nim silniki prądu stałego, dzięki czemu uzyskano bardzo dobrą manewrowość. Koła nie miały możliwości mechanicznego skrętu – łazik zmieniał kierunek jazdy dzięki parom kół obracającym się w przeciwne strony (analogicznie jak w czołgu). Łazik Magma wyposażono w peryskop z zamontowaną kamerą i aparatem fotograficznym oraz w manipulator specjalnie dostosowany do konkretnych zadań (manipulator przegubowy do pobierania próbki skały albo manipulator kartezjański do obsługi panelu sterującego).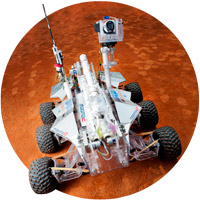
W robocie zainstalowano również heksakopter, służący do obserwacji terenu z powietrza (był to pierwszy w historii zawodów URC przypadek wykorzystania obiektów latających, Polacy byli także jedyną drużyną posiadającą tego rodzaju sprzęt). Dzięki szerokiemu zastosowaniu tworzyw sztucznych łazik w podstawowej konfiguracji ważył tylko 30 kilogramów.
Studenci Wydziału Mechanicznego Politechniki Białostockiej uczestniczyli w konkursie University Rover Challenge 2011. W tych prestiżowych zawodach analog mobilnego robota marsjańskiego Magma 2 wywalczył pierwsze miejsce.