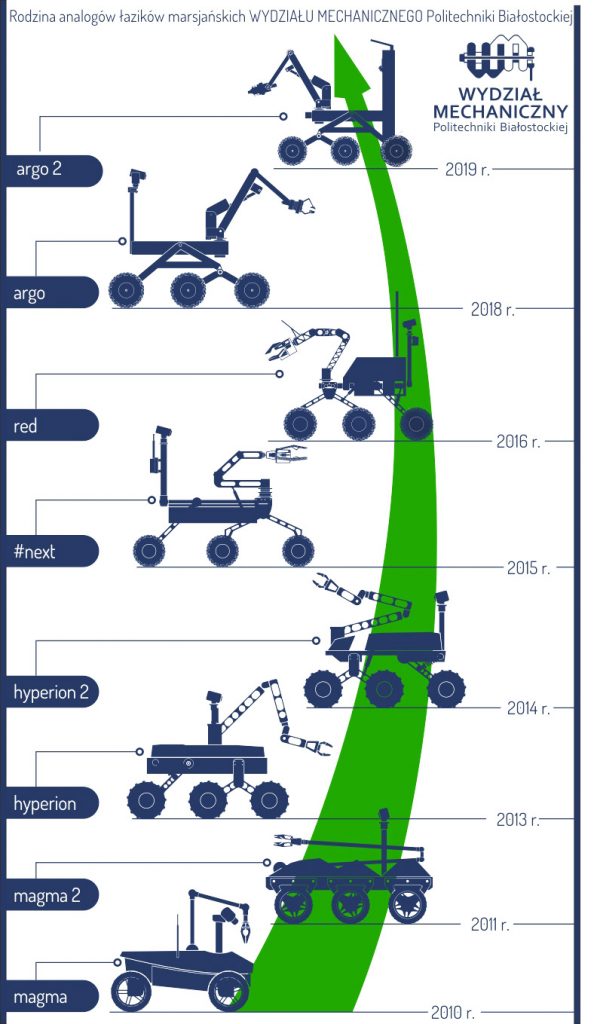
Analogi łazików marsjańskich
Studenci Wydziału Mechanicznego Politechniki Białostockiej budują analogi łazików marsjańskich od 2010 roku. Skonstruowali już osiem takich maszyn i siedem razy brali udział w prestiżowych zawodach University Rover Challenge w USA: trzy razy zajęli pierwsze miejsce (2011, 2013, 2014 r.), raz trzecie (2010 r.), raz czwarte (2015 r.) a raz siódme (2016 r.).

Od 2011 roku reprezentanci Wydziału Mechanicznego Politechniki Białostockiej stale utrzymują się w pierwszej dziesiątce najlepszych na świecie drużyn konstruujących analogi łazików marsjańskich!
 Na początku był robot Magma
Na początku był robot Magma
Analog mobilnego robota marsjańskiego Magma powstał w 2010 roku w wyniku współpracy trzech instytucji: Wydziału Mechanicznego Politechniki Białostockiej, Wydziału Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Mikołaja Kopernika w Toruniu oraz stowarzyszenia Mars Society Polska. Pracowała nad nim drużyna w składzie: Wojciech Głażewski, Sebastian Meszyński, Piotr Ciura, Emil Błoński, Marcin Dąbrowski, Kamil Wyrąbkiewicz, Rafał Zieliński, Bartosz Solnik, Mateusz Józefowicz oraz Szymon Zimnoch.
Pojazd zbudowano w tradycyjnym układzie czterokołowym. Zastosowano silniki prądu stałego – dzięki czemu uproszczono układ sterujący i uzyskano bardzo dobrą manewrowość. Koła nie miały możliwości mechanicznego skrętu, dlatego łazik zmieniał kierunek jazdy analogicznie jak czołg – dzięki parom kół obracającym się w przeciwne strony. Łazik Magma wyposażono w peryskop z zamontowaną kamerą i aparatem fotograficznym oraz w manipulator o pięciu stopniach swobody z chwytakiem. Łączność z robotem odbywała się za pomocą sieci Wi-Fi z antenami pozwalającymi uzyskać zasięg do 3 km.
Studenci Wydziału Mechanicznego Politechniki Białostockiej uczestniczyli w konkursie University Rover Challenge, zdobywając w tych zawodach trzecie miejsce, tuż za Amerykanami oraz drużyną z Kanady.
 Magma druga – miejsce pierwsze
Magma druga – miejsce pierwsze
Analog mobilnego robota marsjańskiego Magma 2 zbudowano w 2011 roku. Projekt zrealizowano przez Wydział Mechaniczny Politechniki Białostockiej oraz stowarzyszenie Mars Society Polska. W skład zespołu konstruującego robota weszli: Wojciech Głażewski, Piotr Ciura, Emil Błoński, Szymon Zimnoch, Bartosz Solnik oraz Jacek Wojdyła, Paweł Krzywosz, Krzysztof Pisowacki i Paweł Solnik. Opiekę nad zespołem sprawowali: dr hab. inż. Kazimierz Dzierżek oraz dr inż. Justyna Tołstoj-Sienkiewicz.
Magma 2 był konstrukcją sześciokołową. Zastosowano w nim silniki prądu stałego, dzięki czemu uzyskano bardzo dobrą manewrowość. Łazik Magma 2 wyposażono w peryskop z zamontowaną kamerą i aparatem fotograficznym oraz w manipulator specjalnie dostosowany do konkretnych zadań. W robocie zainstalowano również heksakopter, służący do obserwacji terenu z powietrza.
Studenci Wydziału Mechanicznego Politechniki Białostockiej uczestniczyli w konkursie University Rover Challenge 2011. W tych prestiżowych zawodach analog mobilnego robota marsjańskiego Magma 2 wywalczył pierwsze miejsce.
 Hyperion – całkiem nowy robot
Hyperion – całkiem nowy robot
Wielozadaniowy analog Łazika Marsjańskiego Hyperion skonstruowano w 2013 roku. Zbudowała go drużyna studentów Wydziału Mechanicznego Politechniki Białostockiej w składzie: Michał Grześ, Robert Bałdyga, Jakub Maliszewski, Jacek Wojdyła, Piotr Ciura oraz Ariel Lech. Opiekunem zespołu był dr hab. inż. Kazimierz Dzierżek.
Hyperion był sześciokołową konstrukcją o innowacyjnym zawieszeniu, ułatwiającym pokonywanie przeszkód terenowych. Potrafił pokonywać wzniesienia o kącie nachylenia do 60 stopni. Każde z jego kół dysponowało niezależnym napędem. Robota wyposażono w manipulator przegubowy z sześcioma stopniami swobody. Łazik dysponował system wizyjnym składającym się z 3 kamer oraz dwóch nadajników transmitujących obraz na różnych częstotliwościach. Na pokładzie robota znajdował się system GPS, umożliwiający lokalizację.
Drużyna studentów Wydziału Mechanicznego Politechniki Białostockiej z powodzeniem wzięła udział w zawodach Univeristy Rover Challenge 2013. Na pustyni w stanie UTAH w Stanach Zjednoczonych Hyperion wywalczył pierwsze miejsce zdobywając największą liczbę punktów w historii zawodów (493 na 500!).
 Hyperion 2 – kolejny sukces drużyny
Hyperion 2 – kolejny sukces drużyny
Analog mobilnego robota marsjańskiego Hyperion 2 został skonstruowany w 2014 r. przez zespół w składzie: Michał Grześ, Robert Bałdyga, Jakub Maliszewski, Jacek Wojdyła, Maciej Baka oraz Maciej Rećko. Opiekunem zespołu był dr hab. inż. Kazimierz Dzierżek.
Hyperiona 2 zbudowano na platformie sześciokołowej. Ulepszono układ zawieszenia i poprawiono stabilność robota na nierównościach terenu. Jego ramę wykonano w pełni z profili aluminiowych. Zaprojektowano nowy manipulator – robot korzystał z ramion różnego rodzaju – w zależności od wykonywanego zadania. Informacje o otoczeniu łazik zbierał dzięki trzem kamerom, łączność zapewniały dwa nadajniki, a dane lokalizacyjne zapewniał system GPS.
Dzięki Hyperionowi 2 zespół studentów z Wydziału Mechanicznego Politechniki Białostockiej drugi rok z rzędu wywalczył pierwsze miejsce na zawodach University Rover Challenge (2014 r., Utah, USA). Hyperion 2 otrzymał również tytuł Podlaskiej Marki Roku 2014.
 Next – następna generacja
Next – następna generacja
Analog mobilnego robota marsjańskiego #next w 2015 roku zbudowali studenci Wydziału Mechanicznego Politechniki Białostockiej: Maciej Rećko, Maciej Baka, Piotr Czaplicki, Jakub Kuryło, Artur Milewski i Michał Ostaszewski. Opiekunem zespołu była dr inż. Justyna Tołstoj-Sienkiewicz.
Nexta zaprojektowano jako konstrukcję mobilną, sześciokołową. Każde koło sterowane było niezależnie. Robota wyposażono w manipulator o 5 stopniach swobody oraz chwytak z trzypunktowym chwytem i nieskończonym kątem obrotu. Sterowanie łazikiem odbywało się za pomocą komputera osobistego klasy PC poprzez radiomodem, ale możliwe też było przy pomocy telefonu z systemem Android. Obraz z 5 kamer robota przesyłany był przez system używający częstotliwości 900MHz i 2.4 GHz. Informacje o położeniu robota zapewniał system GPS, zintegrowana jednostka pomiarowa mierząca przechyły, pochyły i obroty w układzie lokalnym oraz seria enkoderów (jednostka, która wylicza obroty wału) na napędach i układ samokontroli termiczno-napięciowej.
Analog łazika marsjańskiego #next zbudowany przez studentów Wydziału Mechanicznego Politechniki Białostockiej na zawodach University Rover Challenge w USA w 2015 r. uplasował się na czwartym miejscu (344 punkty na 500), zaś na European Rover Challenge wywalczył miejsce drugie.
 RED: rekonesans – eksploracja – odkrywanie
RED: rekonesans – eksploracja – odkrywanie
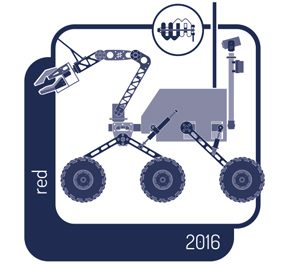
Analog łazika marsjańskiego RED zbudowano na Wydziale Mechanicznym Politechniki Białostockiej 2016 roku. Skonstruował go zespół w składzie: Maciej Rećko, Maciej Baka, Piotr Czaplicki, Jakub Kuryło, Artur Milewski, Michał Ostaszewski, Piotr Tomaszuk, Paweł Turycz. Dodatkowo przy wsparli go: Tomasz Grześ, Aneta Łukowska, Patryk Mądry, Łukasz Mierzejewski, Adrian Pilis, Tomasz Szczęsny i Krzysztof Zalewski. Wszyscy członkowie projektu należą do Koła Naukowego Robotyków, którego opiekunem jest dr inż. Justyna Tołstoj-Sienkiewicz.
Analog łazika marsjańskiego RED (RECONNAISSANCE – EXPLORATION – DISCOVERY) był sześciokołowym robotem mobilnym, wyposażonym w ramię z trójpalczastym chwytakiem. Jego układy elektroniczne pracowały w czasie rzeczywistym i były podzielone na moduły ułożone w podobny sposób, jak w komputerze klasy PC. Konstruktorzy pomyśleli również o wyposażeniu go w system podciśnieniowego pobierania próbek gleby. RED mógł też automatycznie generować raporty o przeprowadzonych badaniach. Było to wyjątkowe urządzenie, które mogło autonomicznie dotrzeć do wskazanego punktu w terenie oraz – również w sposób autonomiczny – posługiwać się ramieniem z chwytakiem.
Na zawodach University Rover Challenge 2016 w USA analog łazika marsjańskiego RED uplasował się na siódmym miejscu. Natomiast na European Rover Challenge 2016 robot z Wydziału Mechanicznego Politechniki Białostockiej wywalczył miejsce piąte.
 ARGO
ARGO
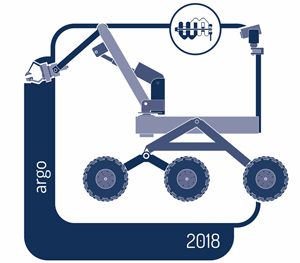
Analog łazika marsjańskiego Argo skonstruowano na Wydziale Mechanicznym Politechniki Białostockiej w 2018 roku. Łazik skonstruował zespół studentów w składzie: inż. Aneta Łukowska, Barbara Kuc, Piotr Tomaszuk, Igor Tylman, Paweł Rółkowski, Adam Buczyłowski, Jakub Czygier, Karol Haraburda, Paweł Straszyński i Kamil Kamieński. W pracach wsparli ich również: Paweł Frejda, Damian Łapiński, Łukasz Ornowski, Łukasz Magnuszewski, Maciej Leszczyński oraz Maciej Ołdakowski. Nad całością projektu czuwał dr hab. inż. Kazimierz Dzierżek, mgr inż. Maciej Rećko oraz mgr inż. Michał Ostaszewski.
Analog łazika marsjańskiego Argo jest sześciokołowym robotem mobilnym, który wyposażono w manipulator z trójpalczastym chwytakiem.
Analog łazika marsjańskiego ARGO zbudowany przez studentów Wydziału Mechanicznego Politechniki Białostockiej na zawodach Canadian International Rover Challenge 2018 r. uplasował się na drugim miejscu, natomiast na European Rover Challenge wywalczył miejsce czwarte.
ARGO 2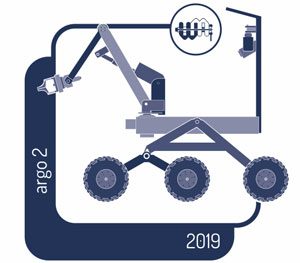
Analog łazika marsjańskiego Argo 2 skonstruował zespół w składzie: inż. Aneta Łukowska (koordynator), inż. Piotr Tomaszuk, inż. Barbara Kuc, Jakub Czygier, Karol Haraburda, Przemysław Dąbrowski, Paweł Rółkowski, Adam Buczyłowski, Igor Tylman, Kamil Kamieński, Adrian Kawecki, Łukasz Magnuszewski, Paweł Straszyński, Michał Olszyński, Robert Grabowy, Rafał Waraksa, Wiktoria Jankowska, Julia Napora. Opiekunami projektu są: dr hab. inż. Kazimierz Dzierżek oraz mgr inż. Maciej Rećko.
Argo 2 wyposażono w mechanizm różnicowy pozwalający na niezależne działanie każdego wahacza. Pierwszy człon ramienia robota napędza siłownik elektryczny, drugi za pomocą silników DC i przekładnipasowej. Efektor końcowy wyposażono w dwupalczasty chwytak, z gumowymi nasadkami adaptacyjnymi. Zintegrowany układ pochylania i obrotu chwytaka zapewnia elastyczność w wykonywaniu zadań. System wizyjny oparty został o kamery cyfrowe i system rozpoznawania obiektów bazujący na mikrokomputerze graficznym NVIDIA Jetson TX2. Łazik wyposażony jest wielowarstwowy system bezpieczeństwa oraz pokładową sieć Ethernet i własny protokół komunikacyjny oraz magistralę CAN sprzyjającą modułowej budowie robota, ułatwiającą diagnostykę oraz zmniejszającą okablowanie urządzenia.

University Rover Challenge

Zawody University Rover Challenge gromadzą miłośników analogów łazików marsjańskich z wielu krajów. Pod względem ukształtowania terenu i suchego klimatu warunki panujące w okolicy Hanksville (USA) bardzo przypominają środowisko Marsa. Organizatorzy University Rover Challenge wykorzystują te skrajne warunki środowiskowe do testowania nowych robotów. W tym celu zbudowano tam analog bazy marsjańskiej – Mars Desert Research Station i po to rozgrywa się co roku zawody analogów łazików marsjańskich.
