Hyperion
– całkiem nowy robot
Wielozadaniowy analog Łazika Marsjańskiego Hyperion skonstruowano w 2013 roku. Zbudowała go drużyna studentów Wydziału Mechanicznego Politechniki Białostockiej w składzie: Michał Grześ, Robert Bałdyga, Jakub Maliszewski, Jacek Wojdyła, Piotr Ciura oraz Ariel Lech. Opiekunem zespołu był dr hab. inż. Kazimierz Dzierżek.
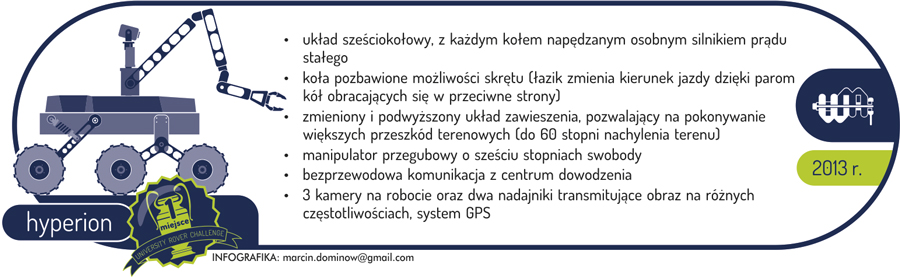
Hyperion był sześciokołową konstrukcją o innowacyjnym zawieszeniu, ułatwiającym pokonywanie przeszkód terenowych. Potrafił pokonywać wzniesienia o kącie nachylenia do 60 stopni. Każde z jego kół dysponowało niezależnym napędem. Robota wyposażono w manipulator przegubowy z sześcioma stopniami swobody. Manipulator posiadał dwa narzędzia wykonawcze: chwytak oraz wiertło do pobierania próbek gleby. Robot dysponował system wizyjnym składającym się z 3 kamer oraz dwóch nadajników transmitujących obraz na różnych częstotliwościach. Na pokładzie robota znajdował się system GPS, umożliwiający lokalizację.
Hyperiona zbudowano z myślą o poruszaniu się w trudnym terenie. Jego zasięg przekraczał kilometr a akumulatory pozwalały na pracę przez 2 godziny.
Drużyna studentów Wydziału Mechanicznego Politechniki Białostockiej z powodzeniem wzięła udział w zawodach Univeristy Rover Challenge 2013. Na pustyni w stanie UTAH w Stanach Zjednoczonych Hyperion wywalczył pierwsze miejsce zdobywając największą liczbę punktów w historii zawodów (493 na 500).
Projekt współfinansowano dzięki programowi Generacja Przyszłości.