Hyperion 2
– kolejny sukces drużyny
Analog mobilnego robota marsjańskiego Hyperion 2 został skonstruowany w 2014 r. przez zespół w składzie: Michał Grześ, Robert Bałdyga, Jakub Maliszewski, Jacek Wojdyła, Maciej Baka oraz Maciej Rećko. Opiekę nad zespołem sprawował dr hab. inż. Kazimierz Dzierżek.
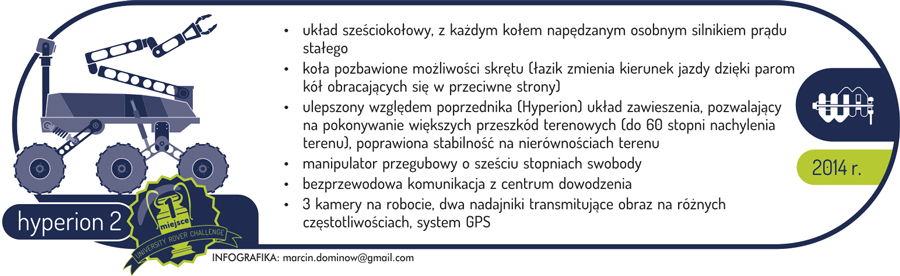
 Hyperiona 2 zbudowano na platformie sześciokołowej. Ulepszono układ zawieszenia i poprawiono stabilność robota na nierównościach terenu. Jego ramę wykonano w pełni z profili aluminiowych – dzięki temu była ona lżejsza i wytrzymalsza niż w poprzednim Hyperionie. Zaprojektowano nowy manipulator, który był udoskonaleniem koncepcji z pierwszego Hyperiona. Robot korzystał z ramion różnego rodzaju – w zależności od wykonywanego zadania (od lekkiego manipulatora o 6 stopniach swobody, do manipulatora o zwiększonej wytrzymałości i tylko 3 stopniach swobody). Konstruktorzy zwiększyli też funkcjonalność łazika poprzez ulepszenie algorytmu sterowania ramieniem. Informacje o otoczeniu łazik zbierał dzięki trzem kamerom, łączność zapewniały dwa nadajniki, a dane lokalizacyjne zapewniał system GPS.
Hyperiona 2 zbudowano na platformie sześciokołowej. Ulepszono układ zawieszenia i poprawiono stabilność robota na nierównościach terenu. Jego ramę wykonano w pełni z profili aluminiowych – dzięki temu była ona lżejsza i wytrzymalsza niż w poprzednim Hyperionie. Zaprojektowano nowy manipulator, który był udoskonaleniem koncepcji z pierwszego Hyperiona. Robot korzystał z ramion różnego rodzaju – w zależności od wykonywanego zadania (od lekkiego manipulatora o 6 stopniach swobody, do manipulatora o zwiększonej wytrzymałości i tylko 3 stopniach swobody). Konstruktorzy zwiększyli też funkcjonalność łazika poprzez ulepszenie algorytmu sterowania ramieniem. Informacje o otoczeniu łazik zbierał dzięki trzem kamerom, łączność zapewniały dwa nadajniki, a dane lokalizacyjne zapewniał system GPS.
Dzięki Hyperionowi 2 zespół studentów z Wydziału Mechanicznego Politechniki Białostockiej drugi rok z rzędu wywalczył pierwsze miejsce na zawodach University Rover Challenge (2014 r., Utah, USA). Hyperion 2 otrzymał również tytuł Podlaskiej Marki Roku 2014.
Projekt współfinansowano dzięki programowi Generacja Przyszłości.